Программа многоплоскостной балансировки роторного оборудования
Пришла пора объявить о выходе в свет первой версии программы расчета многоплоскостной балансировки. Предлагаю Вашему вниманию небольшой обзор по программе.
К созданию программы подтолкнуло желание облегчить/автоматизировать себе работу при выполнении балансировки роторного оборудования. В чем главные минусы большинства балансировочных программ? В первую очередь - их ограничения, связанные с количеством точек измерения и балансировочных плоскостей (это проблема большинства приборов и отдельных программ). Во вторую очередь - отсутствие контроля за ходом балансировки.
В связи с этим возникла потребность создания простенькой многоплоскостной балансировочной программы, позволяющей наблюдать за ходом балансировки по балансировочным круговым диаграммам. В основу расчета взят алгоритм из учебного пособия Вибродиагностика и вибробалансировка ветроэнергетической установки с вертикальной осью вращения . На основе описанного алгоритма работает балансировочный прибор К-4102М. Казалось бы, остается данный алгоритм перенести в код и программа готова. Но, то ли разработчики совершили ошибку, то ли сознательно умолчали о ней. При тестировании обнаружилось, что в некоторых ситуациях расчет дает близкое решение, в некоторых абсолютно дурные массы, а в некоторых вообще не имеет решения.
За консультациями по данному вопросу обратился к очень хорошему человеку/инженеру/ученому (привет, Василий!), который на пальцах объяснил необходимость и суть регуляризации матриц по пункту 7.1.3.5 методики. При его содействии уравнение было немного модернизировано и разработан алгоритм расчета коэффициента регуляризации. Дальнейшее тестирование показало правильность расчетов.
Перейдем к небольшому экскурсу по программе на примере реальной балансировки. При запуске программа приглашает нас начать новую балансировку.
В данном окне доступен выбор светлой или темной темы приложения (на любителя). Далее переходим к окну выбора точек измерения вибрации и балансировочных плоскостей.
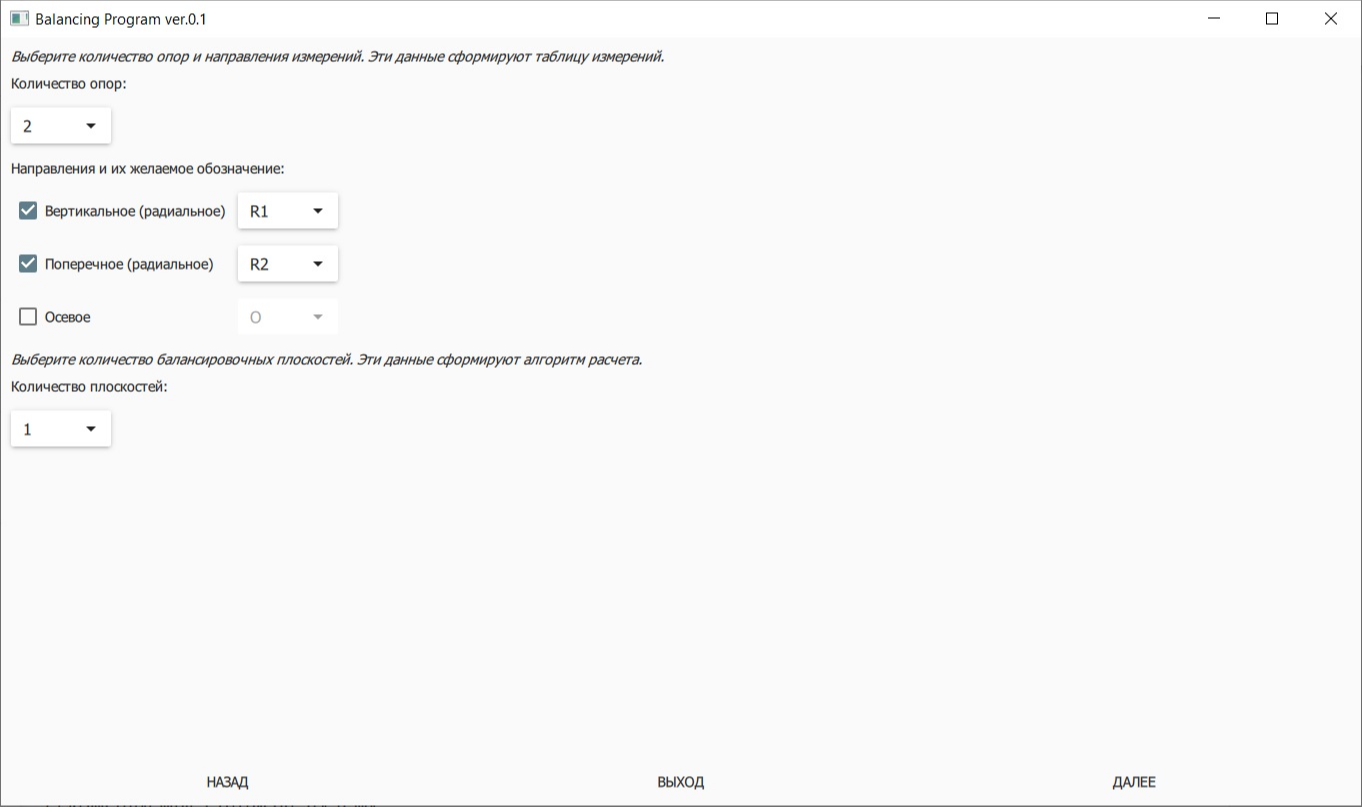
Как и при обычном виброконтроле подшипниковая опора может иметь три взаимноперпендикулярные точки измерения. Исходя из личного опыта, по осевым направлениям балансировка так же возможна, поэтому данное направление доступно для выбора. Так как наименования направлений точек измерения зависят от положения балансируемого оборудования (вертикальное или горизонтальное) и от системы наименований принятой на предприятии, то доступен выбор названий направлений. В данном примере оборудование вертикальное и направления измерений выбраны как R1 и R2.
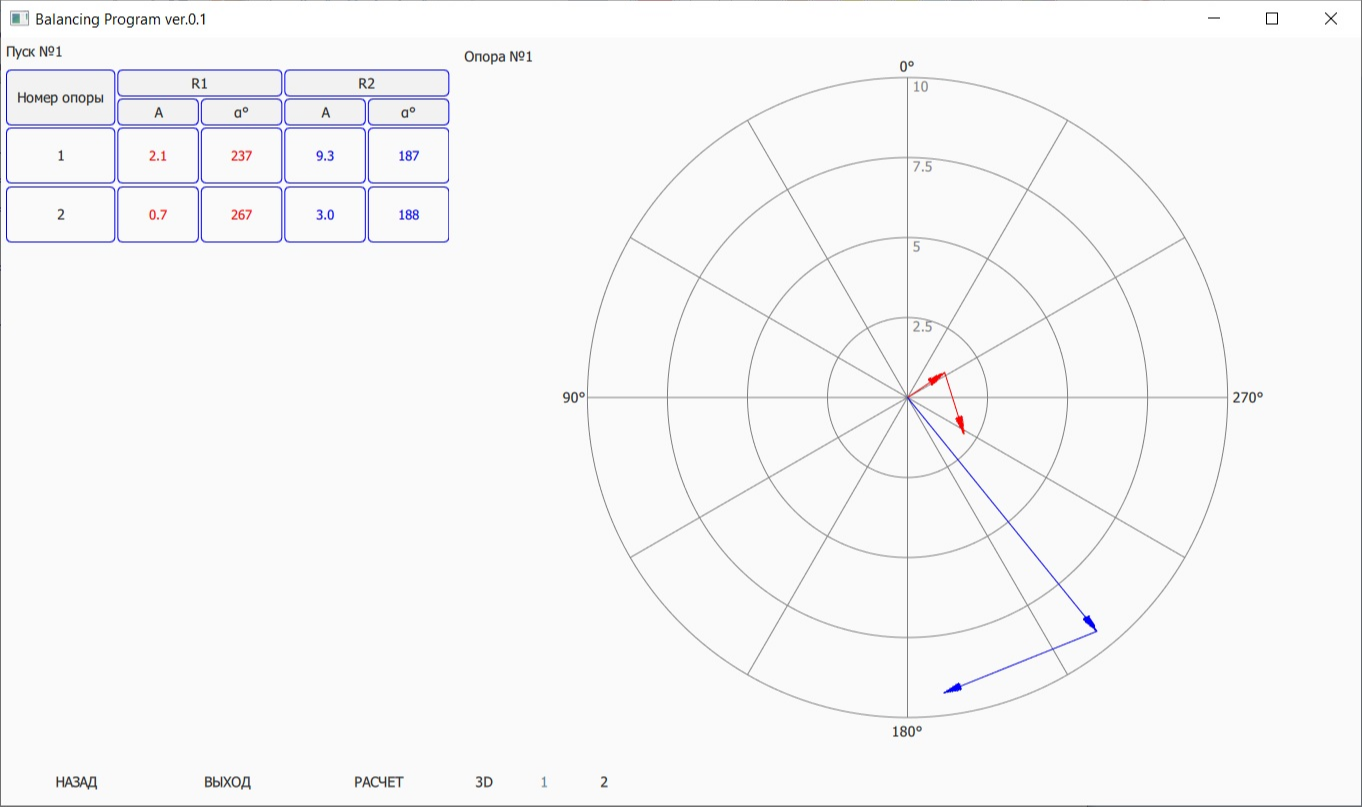
Далее приступаем к вводу данных исходной вибрации (амплитуда/фаза оборотной частоты).
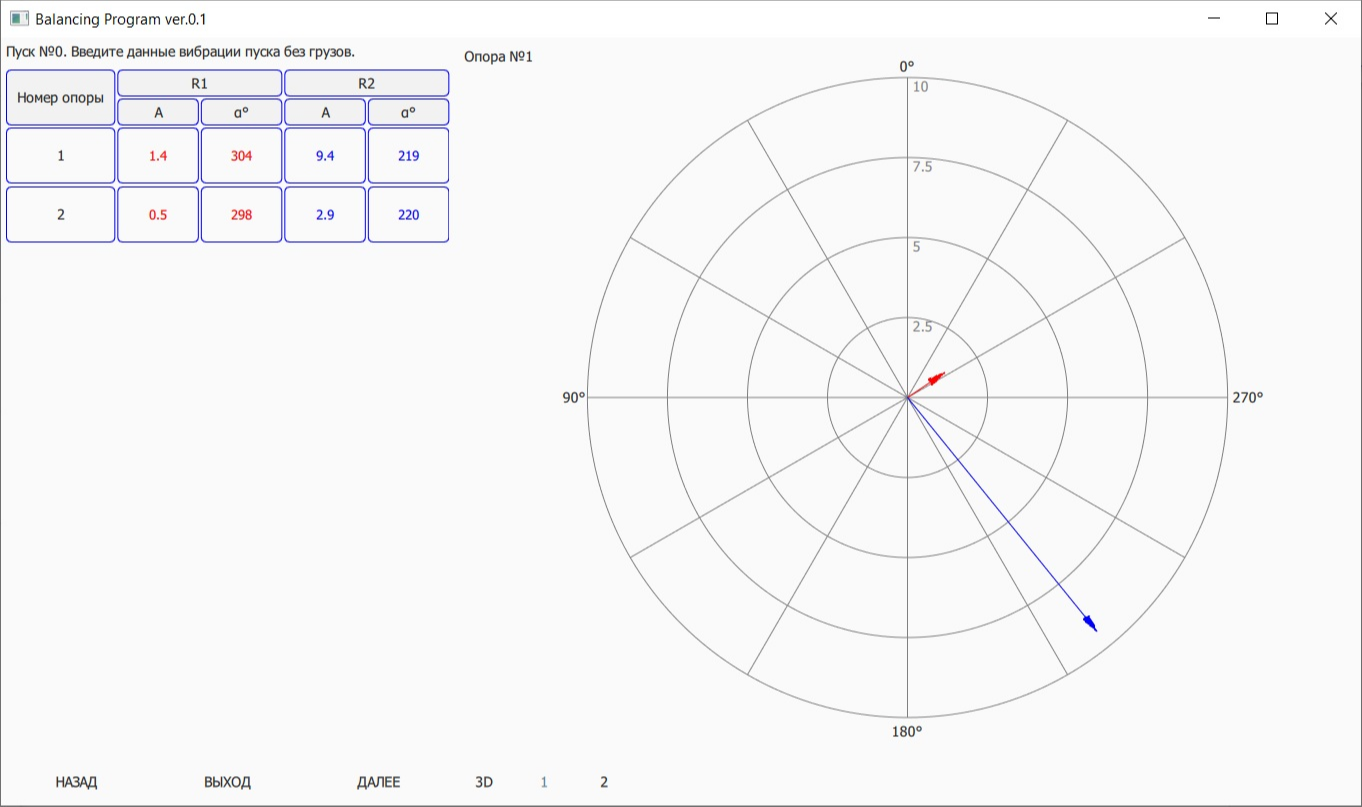
При вводе данных в таблицу слева одновременно происходит построение векторов дисбалансов. На графике работает функция автомасштабирования. Выбор графика по конкретной опоре осуществляется путем нажатия на соответствующую кнопку под графиком (функция 3D-графика в данной версии не доступна). Не обращайте внимание на огромную разницу амплитуд в направлениях R1 и R2 - балансировка проводится при резонансе в направлении R2.
Для балансировочного расчета нам потребуется установка пробного груза и информация по изменению вибрации от него. Указываем массу и угол установки пробного груза.
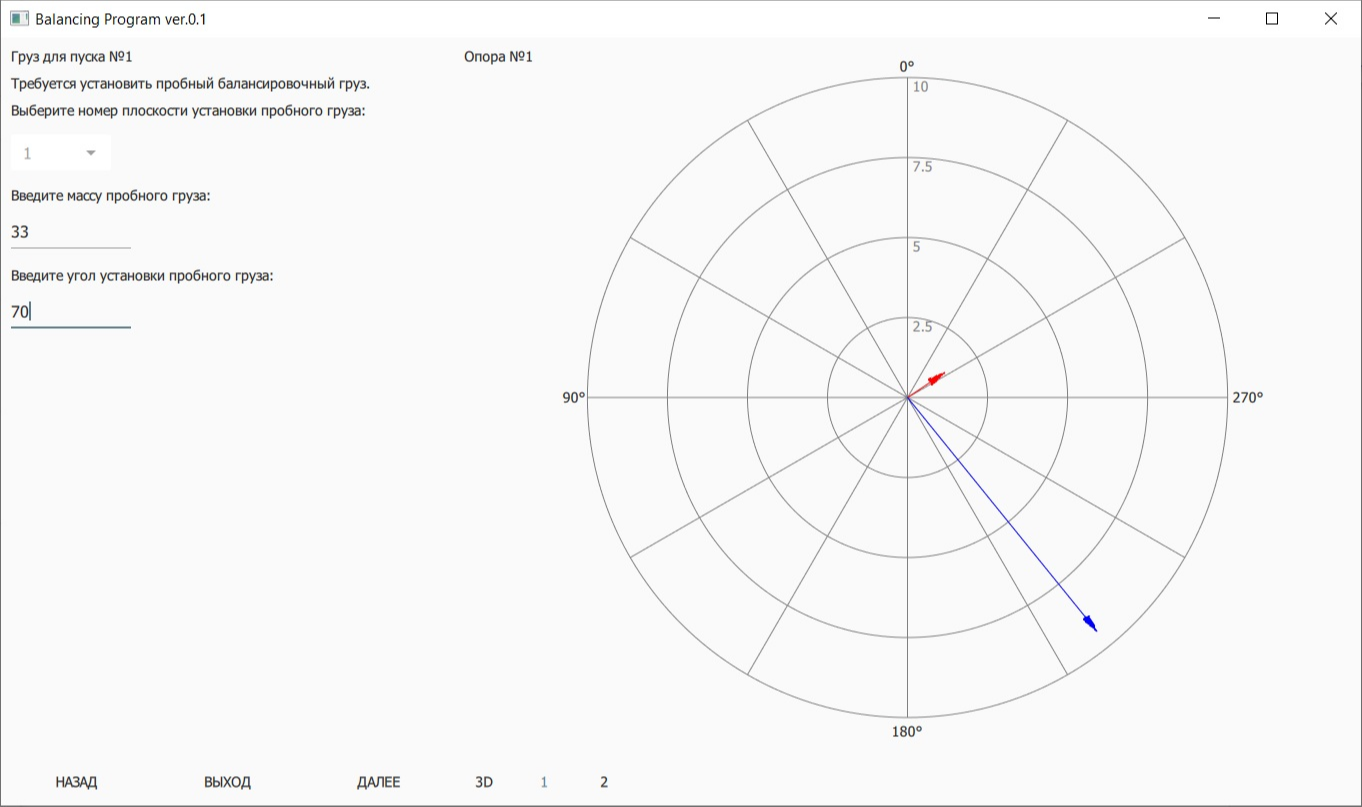
Вводим амплитуду/фазу пуска №1 после установки пробного груза.
На балансировочной диаграмме при вводе данных из концов векторов начальных дисбалансов строятся вектора влияния пробного груза. Условие построения диаграммы стандартное - отсчет фазы против вращения, т.е. вращение по часовой стрелке на графике. Уже визуально видно, что чувствительность к грузу хорошая и напрашивается разворот векторов влияния (положения пробного груза) примерно на 80° по вращению.
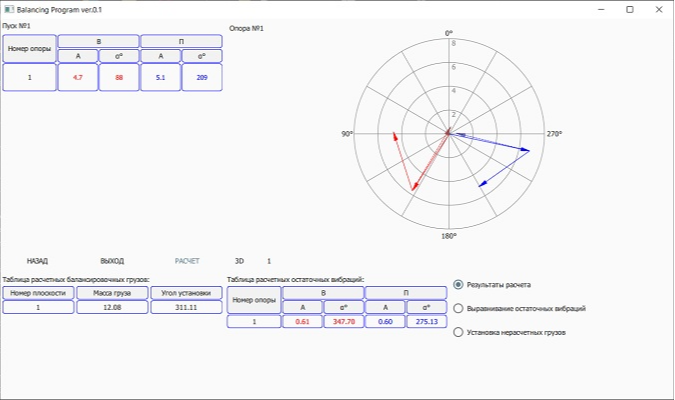
Выполняем расчет.
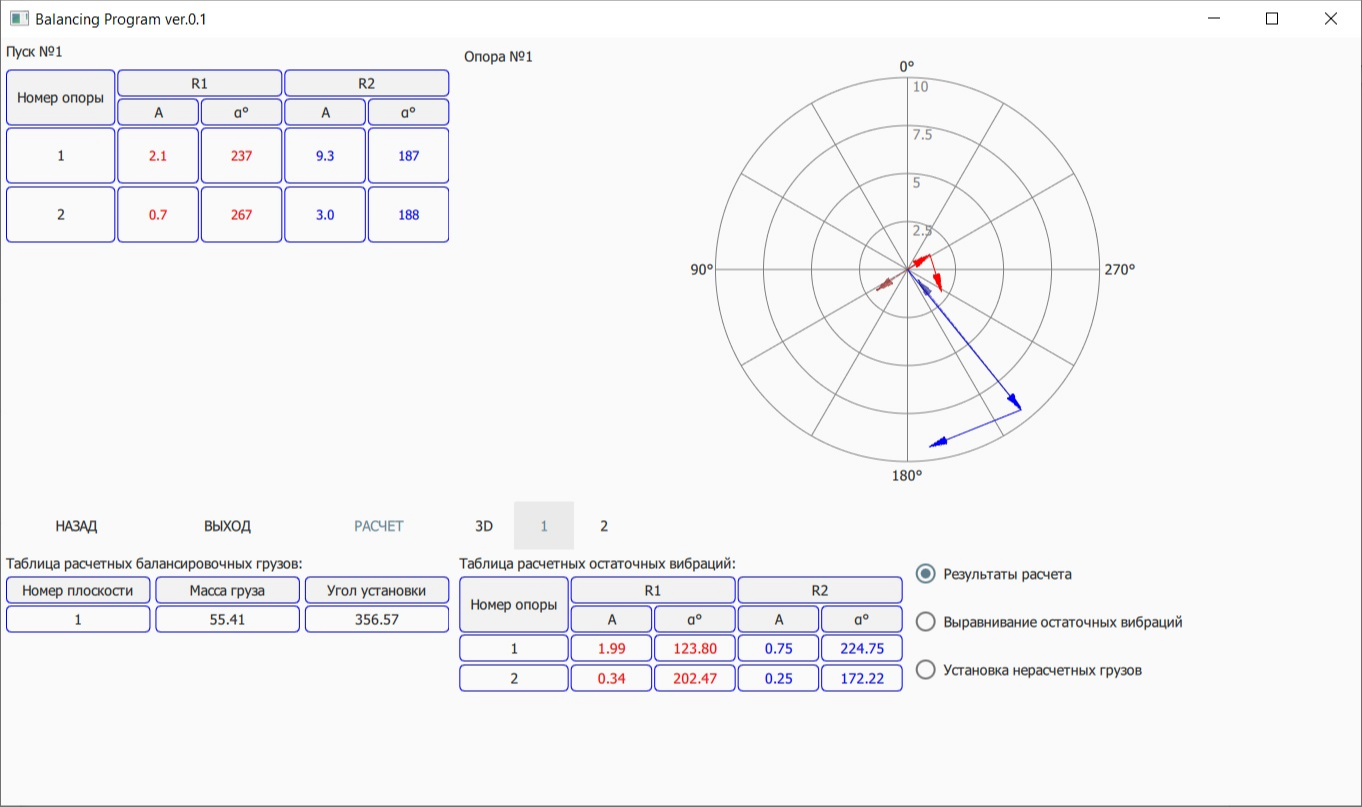
На графике появляются дополнительные мерцающие вектора влияния от расчетного груза. Внизу появились таблицы с расчетными массой и углом балансировочного груза, а так же ожидаемые остаточные вибрации после установки расчетного груза. Как видим, у нас в точке 1R1 амплитуда остаточной вибрации в несколько раз выше остатков по другим точкам контроля.
Для выравнивания остаточных вибраций выберем соответствующую функцию под графиком.
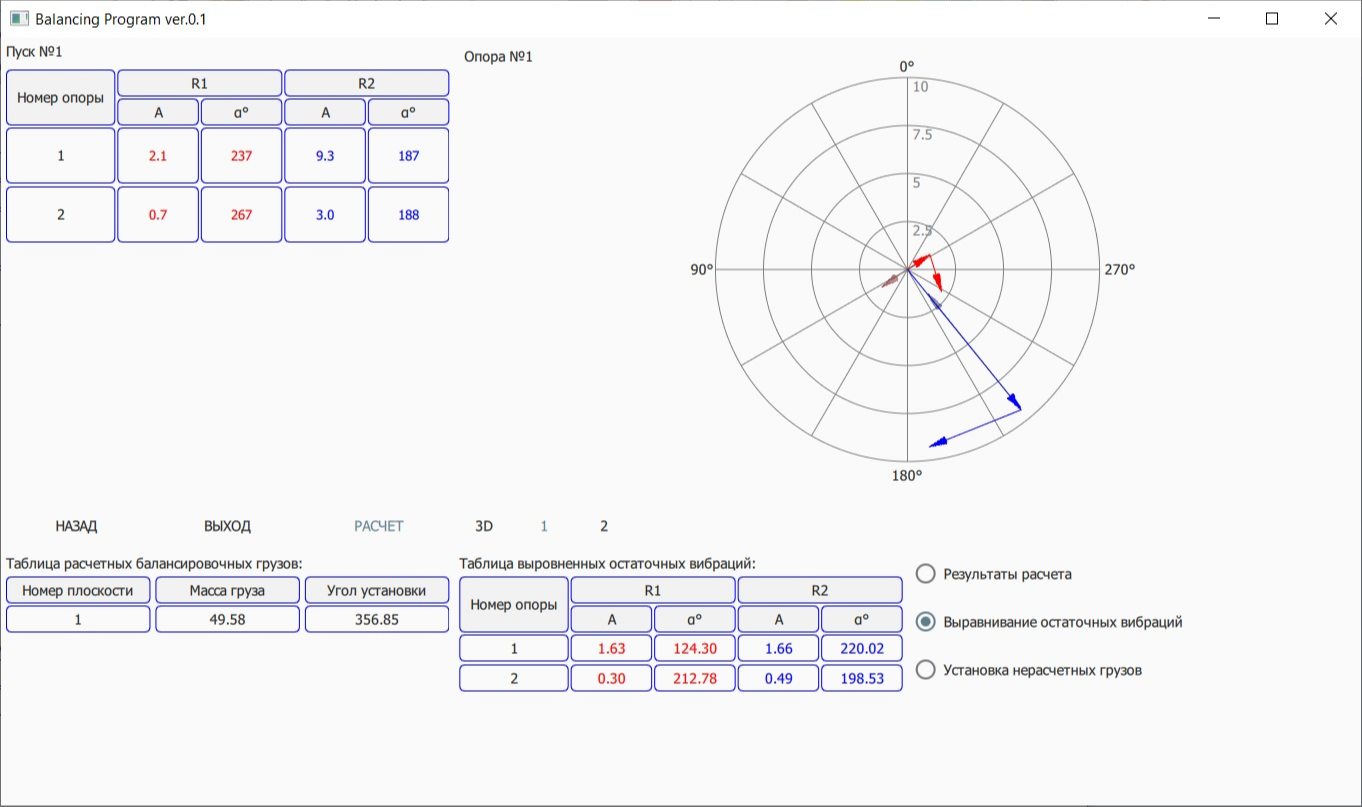
Как видим, мы можем немного уменьшить вибрацию в точке 1R1 за счет ее увеличения в направлении 1R2. Данные расчета полностью совпадают с расчетными данными балансировочной программы прибора VIBXPERT II от PRUFTECHNIK.
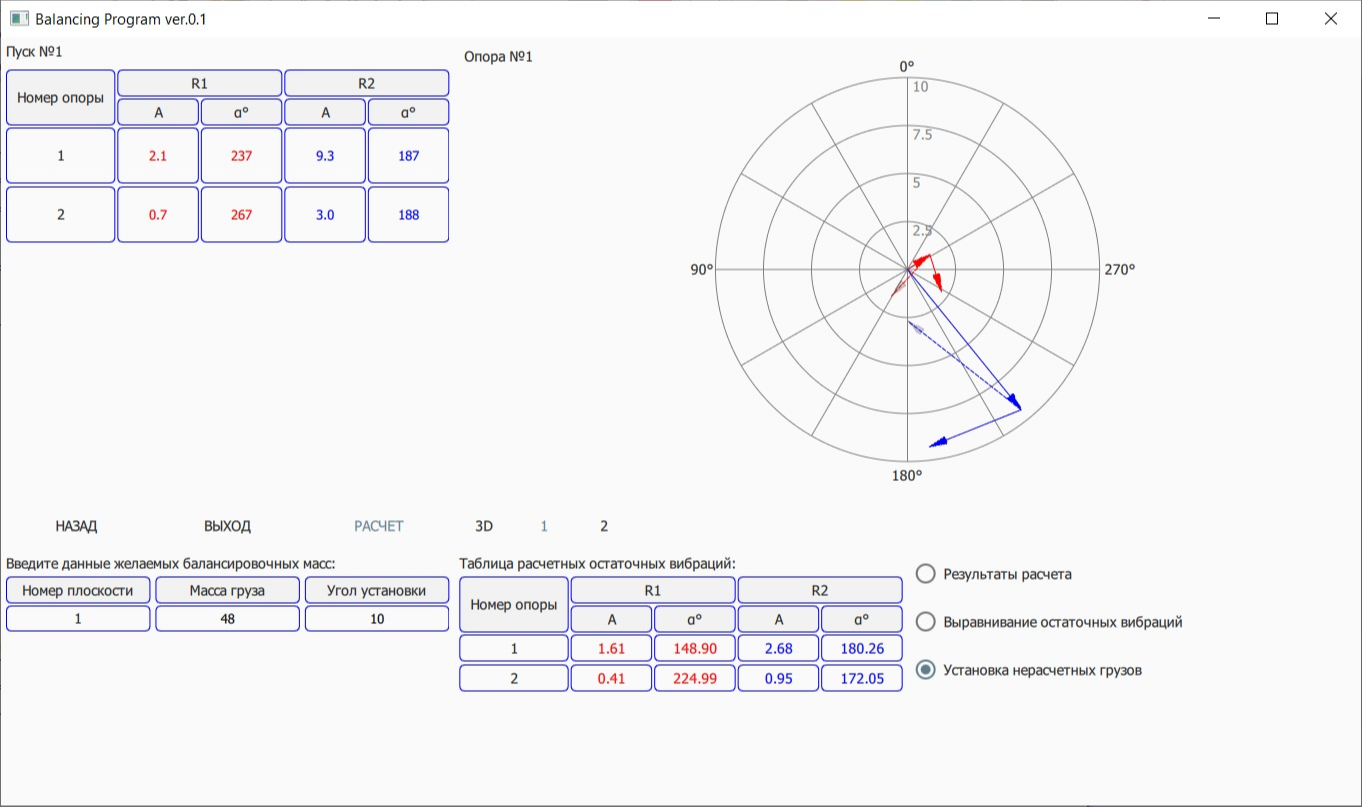
В реальности мы не можем так точно отсчитывать массу и угол установки балансировочного груза, не всегда можем набрать определенную массу и иметь возможность установки на желаемый угол. Для оценки остаточной вибрации после установки близкого по массе груза в ближайшее доступное место необходимо воспользоваться функцией установка нерасчетных грузов.
Функционал на данный момент минимален, но надеюсь что интерфейс удобен. Я надеюсь на Ваши критику, поддержку и хотелки.
В ближайшее время планируются:
1. Мобильная версия на Android.
2. База данных балансировок.
3. 3D-графики (вектора во всех опорах сразу).
Скачать архив с программой (48,7 МБ) можно по ссылке .
Обсуждение на форуме .
Большое спасибо за программу, реально очень полезный инструмент позволявший кардинально ускорить и упростить процесс балансировки. Особенно благодарен за мобильное приложение, очень удобно при балансировке по месту в собственных опорах быстро проверить свои расчеты.