Расчет собственной частоты электродвигателя вертикального насоса и последующего резонанса
Резонанс, Модальный анализ, Собственная частота, Вибродиагностика
В рамках анализа сейсмичности для вертикального 14-полюсного асинхронного электродвигателя насоса мощностью 1000 л.с. частота вибраций была рассчитана с использованием программы анализа методом конечных элементов. В настоящей статье будет обсуждаться моделирование методом конечных элементов для анализа сейсмичности и определения собственной частоты. Расчеты проводились для электродвигателя только на жесткой опоре. После того как электродвигатель прошел стандартные заводские испытания, было проведено ударное испытание в условиях жесткого крепления для определения собственных частот конструкции. Результаты испытания будут сравниваться с расчетными значениями из конечно элементной модели. В настоящей статье также будут обсуждаться последующие проблемы резонанса системы электродвигатель/насос, которые возникли после установки электродвигателя/насоса на площадке. Настоящая статья подчеркнет важность проектирования опорной конструкции электродвигателя, чтобы избежать проблем с резонансом конструкции описанных здесь.
Введение
Для определения сейсмического ускорения, которое будет воспринимать электродвигатель, первым делом необходимо выполнить модальный расчет, в данном случае с использованием анализа модели методом конечных элементов. Особое значение имеет собственная частота моды первого порядка, которая, как правило, имеет очень большое влияние. Это опасная собственная частота вертикального электродвигателя. Увидев результаты расчетов жестко закрепленной модели приходит понимание, что в случае применения частотно-регулируемого привода есть большая вероятность того, что на электродвигателе может возникнуть проблема резонанса, если он будет установлен на более слабой опоре. Такие проблемы приводят к длительным простоям и частым взаимным претензиям, которые обычно сначала адресуют поставщику электродвигателя. Это, как правило, приведет к гневному телефонному звонку от заказчика, который будет жаловаться на вибрацию оборотной частоты, и обвинять производителя электродвигателя в плохой балансировке. Данная ситуация возникает слишком часто и не является проблемой балансировки. Хоть у нас иногда и запрашивают сейсмические данные электродвигателя, мы редко видим, чтобы кто-то заключил договор на проведение анализа всей системы электродвигателя, опоры, насоса и трубопровода. Заказчик был предупрежден, что ему следует выполнить более тщательный анализ, однако он хотел знать только то, как будет вести себя электродвигатель.
Сейсмический анализ
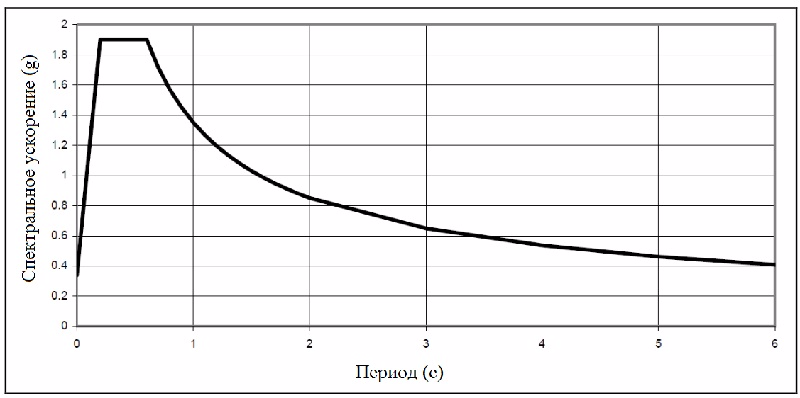
Используя соответствующий код, мы можем получить спектр отклика объекта на месте эксплуатации при испытаниях. На Рисунке 1 представлен типовой график. В целях сохранения конфиденциальности месторасположения оборудования мы не показываем фактические данные, используемые во время данного анализа. Пиковое ускорение в спектре можно определить из графика по известному периоду собственных колебаний конструкции. Преобразование расчетной собственной частоты моды первого порядка даст нам период. Видно, что для очень низких частот (высокий период) ускорение в спектре уменьшается.
Программа анализа методом конечных элементов рассчитает собственную частоту и применит случай сейсмической нагрузки. Было решено, что сейсмическое нагружение будет объединено с полной нагрузкой электродвигателя, работающего при номинальной частоте вращения. Поскольку электродвигатель спроектирован для того, чтобы выдерживать значительно высокие крутящие моменты во время запуска и в переходном режиме, и поскольку площадка не относится к чрезвычайно сейсмической зоне, было сочтено, что никаких реальных изменений конструкции электродвигателя не потребуется. На Рисунке 2 представлен изометрический вид электродвигателя.
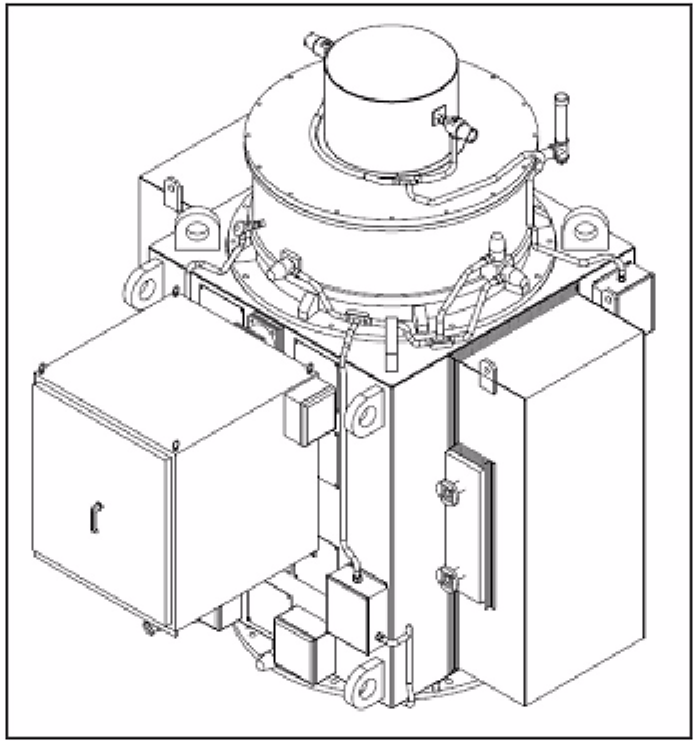
Данный электродвигатель представляет собой полностью закрытую установку с водо-воздушным охлаждением. Верхний подшипник – комбинация опорно-упорного исполнения с вкладышем. Нижний направляющий подшипник – однорядный радиальный шариковый подшипник с глубокой канавкой. Электродвигатель был смоделирован, принимая во внимание вес воды во всех теплообменниках и весь запас масла в камере верхнего подшипника.
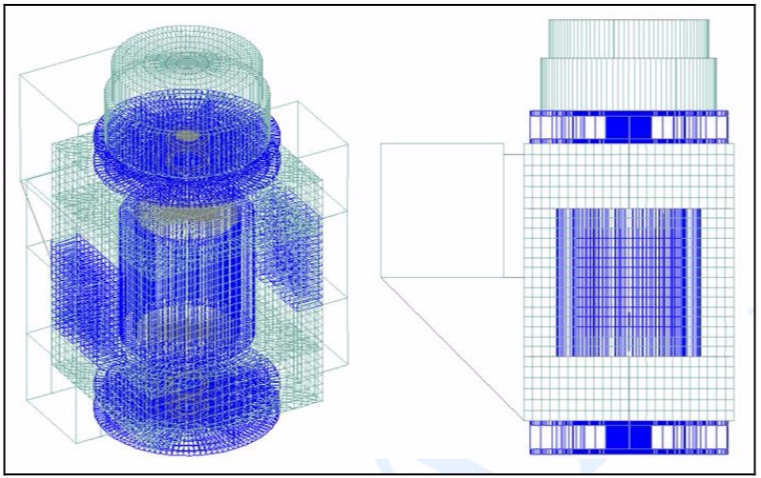
Конечно элементная модель была создана комбинацией твердотельных и пластинчатых элементов, как показано на Рисунке 3. Для оценки системы ротор-подшипник была создана другая конечно элементная модель. Данная система не рассматривается в настоящей статье.
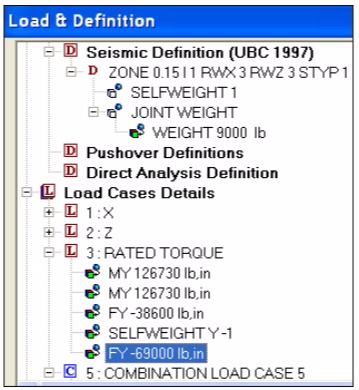
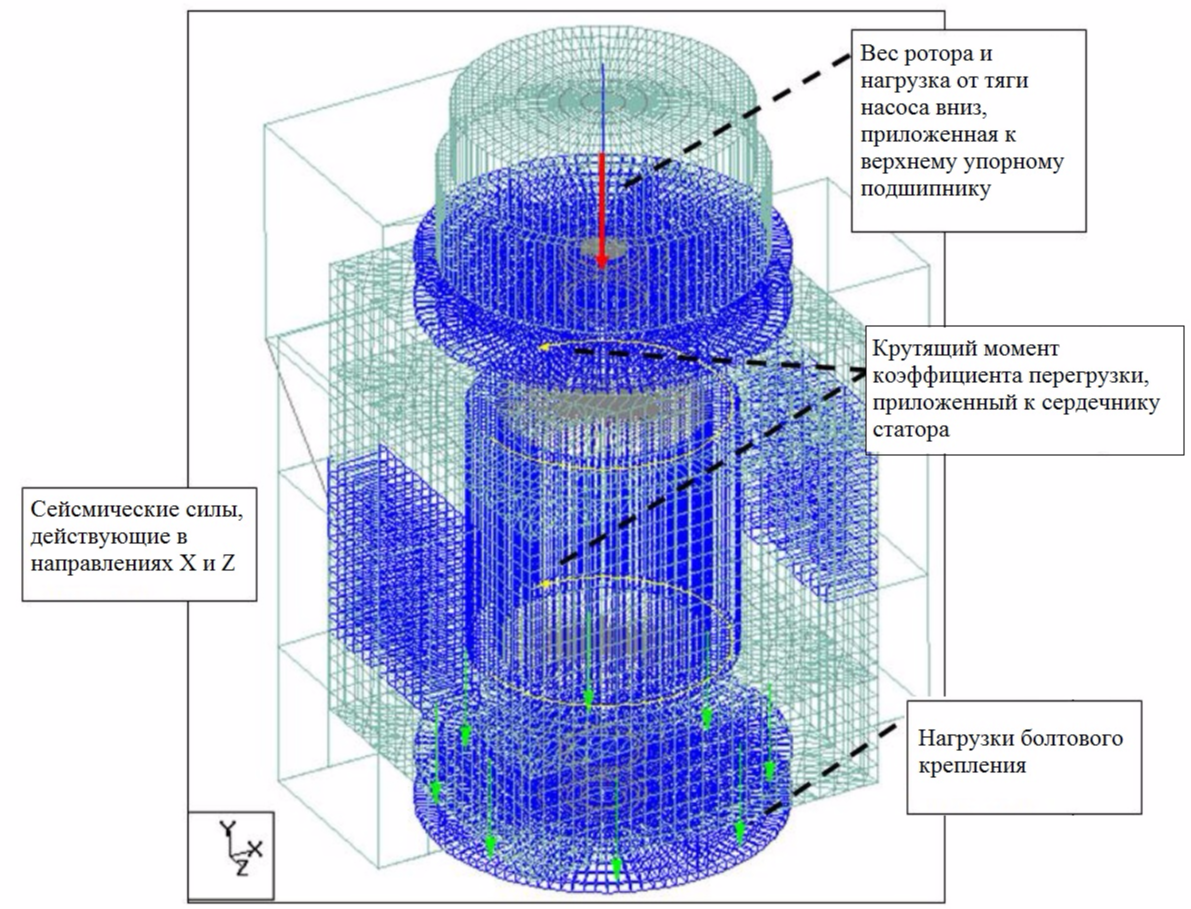
Для получения точного расчета собственной частоты важно смоделировать вес ротора, который, как правило, подвешен к верхнему упорному подшипнику. Этот вес был принят как общий вес в 9000 фунтов, который равен весу ротора. Это масса, не влияющая на жесткость конструкции электродвигателя. Сейсмическая нагрузка рассчитывается с учетом собственного веса электродвигателя и совместной нагрузки в 9000 фунтов вместе с сейсмическими критериями. Затем сейсмические нагрузки прикладываются в обоих поперечных направлениях. Нагрузка при крутящем моменте с коэффициентом перегрузки 1,15 была создана отдельно путем приложения крутящего момента в двух точках крепления статора к корпусу. Остальные нагрузки, применяемые в этом испытании, относятся к весу ротора и максимальной тяге вниз от насоса (комбинированная нагрузка 69000 фунтов), и нагрузки крепежных болтов электродвигателя 38600 фунтов каждая в восьми точках на нижнем корпусе подшипника. Сейсмические и эксплуатационные нагрузки были объединены как корень суммы квадратов комбинации нагрузок в ПО для анализа методом конечных элементов. На Рисунке 4 показана настройка варианта нагружения для анализа методом конечных элементов. На Рисунке 5 показаны нагрузки, прикладываемые к модели.
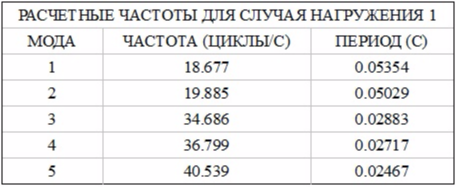
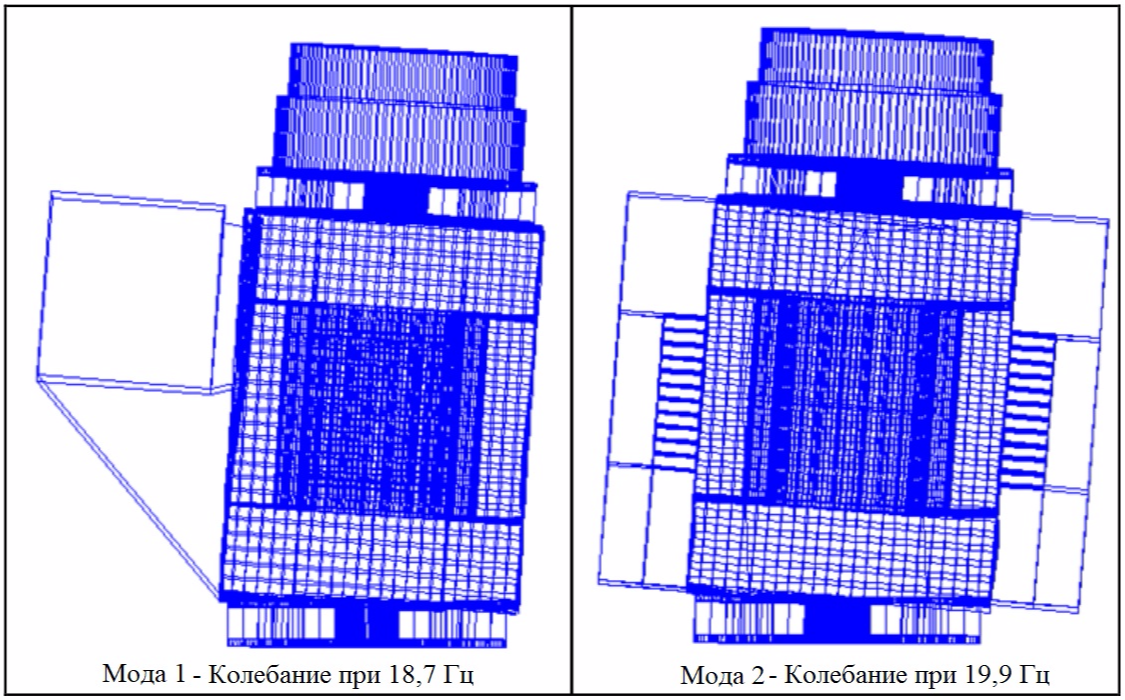
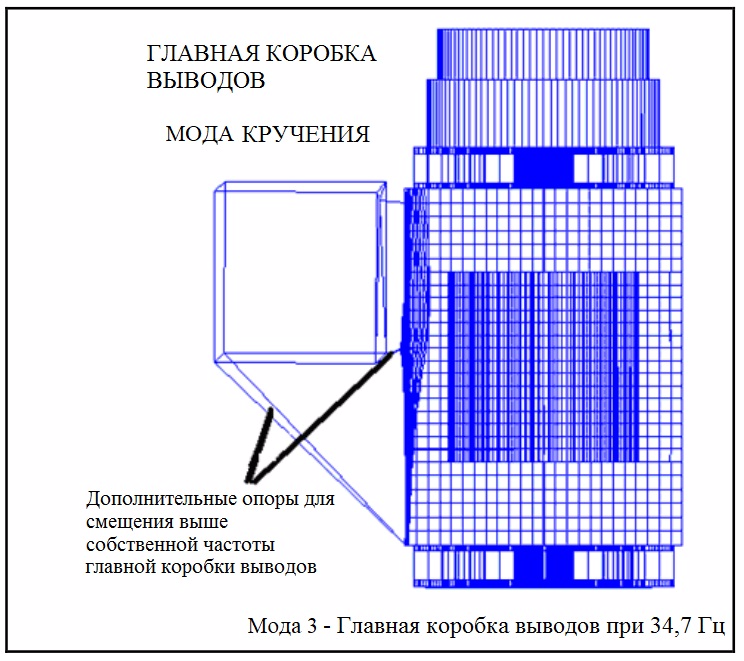
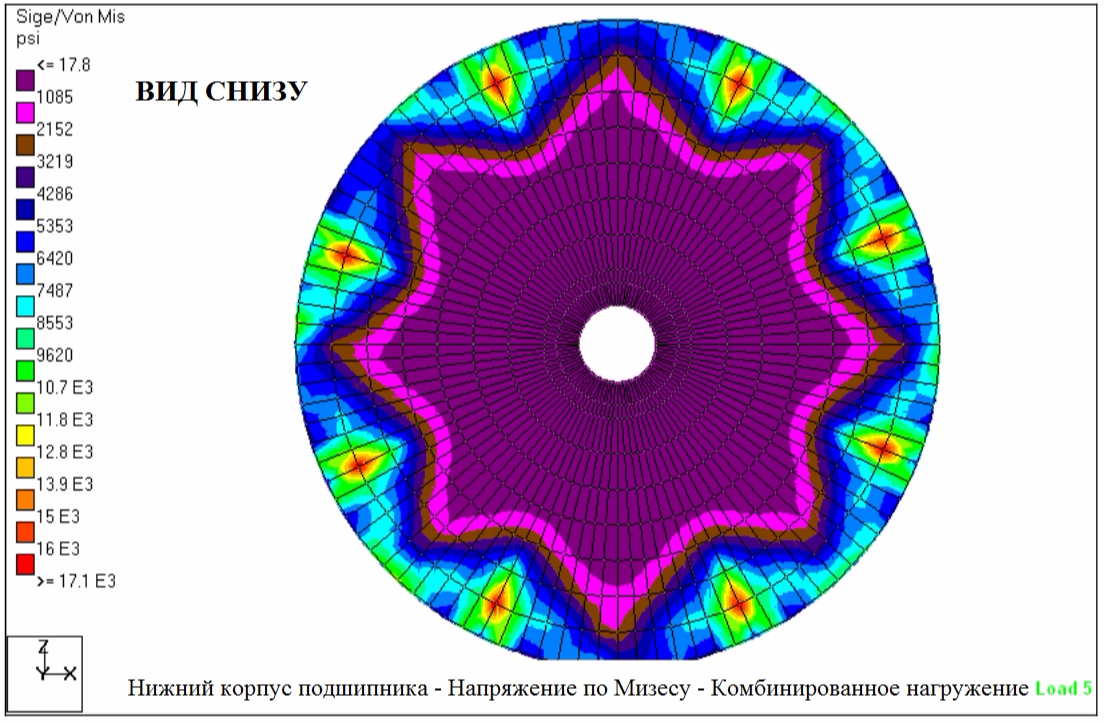
Расчет проводился с учетом зафиксированной нижней части опоры электродвигателя; результаты были проанализированы на предмет напряжений и прогибов. Расчетные собственные частоты приведены в Таблице 1. В Таблице 2 представлены часто встречаемые коэффициенты. Первые две моды колебаний представлены на Рисунке 6, а мода главной коробки выводов – на Рисунке 7. Самым напряженным компонентом корпуса был корпус нижнего подшипника, который представлен на Рисунке 8. Была выполнена оценка всей конструкции электродвигателя и уровни напряжений были признаны приемлемыми.
Первые две моды – это моды колебания электродвигателя (частоты вибраций в направлениях X и Y). Моды 3 – 5 – это моды кручения главной коробки выводов. Главная коробка выводов требовала дополнительной опоры в соответствии с данным результатом.

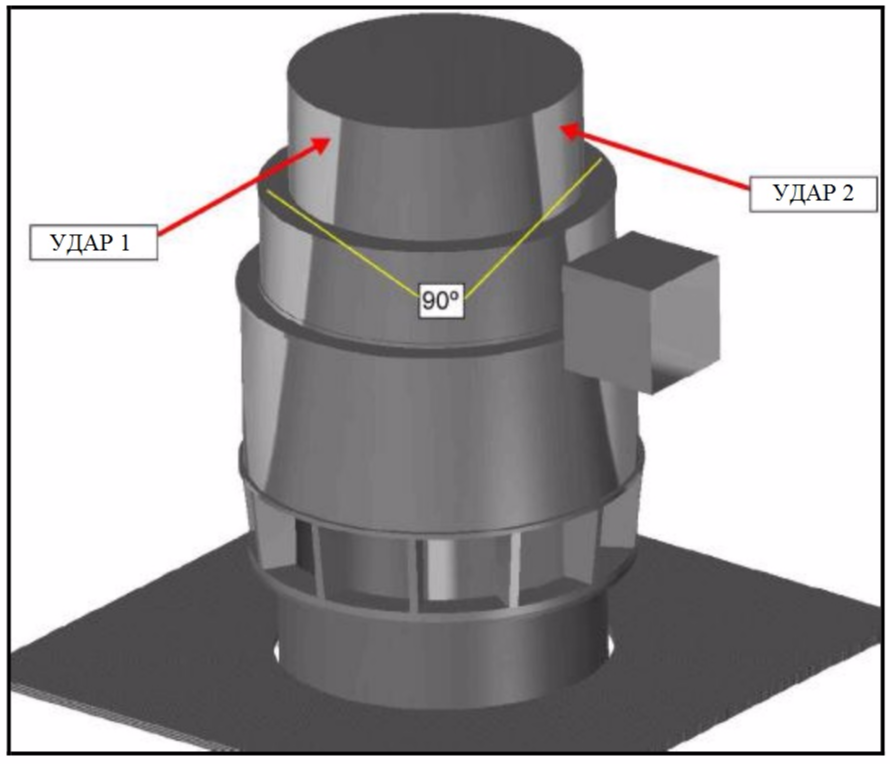
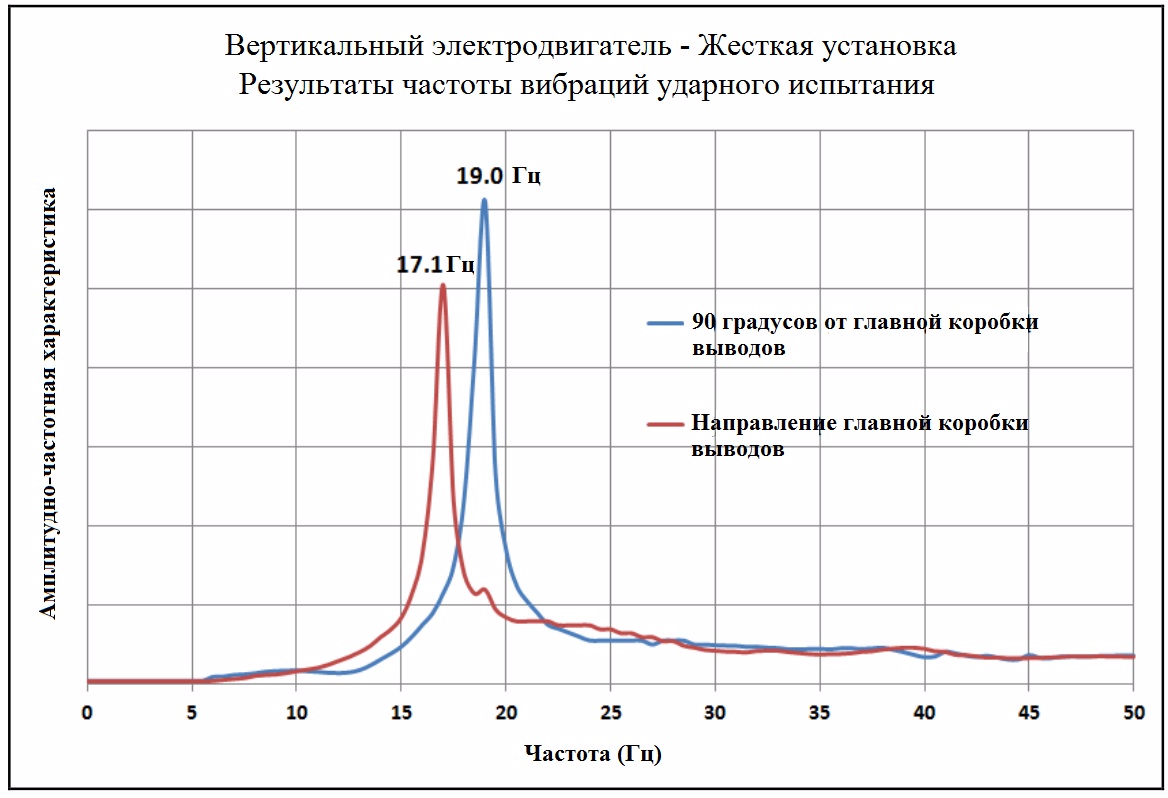
После изготовления электродвигателя его надежно закрепили на толстой фундаментной плите и провели тест на удар. Типовой метод испытания представлен на Рисунке 9. Удары по электродвигателю наносили в двух направлениях под углом 90 градусов: сначала на одной оси с главной коробкой выводов, а затем под углом 90 градусов от главной коробки выводов. Удар и отклик принимаются в верхней части электродвигателя. Результаты ударного испытания представлены на Рисунке 10. Результаты испытания соответствуют погрешностям моделирования и способа крепления, используемого на испытательной площадке, по сравнению с условиями закрепления в конечно элементной модели.
После установки на площадке все системы столкнулись с проблемами собственной частоты приблизительно при 9 Гц согласно результатам изменения частоты вращения частотно-регулируемым приводом. Первоначально некоторые показания вибрации приближались к пиковым значениям 1 дюйм/с на верхнем подшипнике. Благодаря сочетанию точной балансировки и регулировки диапазонов рабочих частот вращения частотно-регулируемого привода электродвигатели могут работать в пределах до срабатывания сигнализации по уровню вибрации, но для достижения этого потребовалось сделать многое. На Рисунках 11 и 12 представлены некоторые фотографии опоры электродвигателя.

Другой пример установки вертикального электродвигателя с проблемой резонанса приведен на Рисунке 13 для наилучшего представления проблематичного случая крепления. Комбинация несимметричной системы опоры и несимметричной конструкции электродвигателя обычно вызывают две близко расположенные собственные частоты во взаимоперпендикулярных направлениях, усложняя решение этой проблемы за счет более широкого диапазона резонанса.

Проверьте свои знания
Ваш 6-полюсный нерегулируемый вертикальный электродвигатель с частотой 60 Гц испытывается на заводе на жестком основании и работает при частоте вибраций, как показано на графике выбега на Рисунке 14. Это проблема?
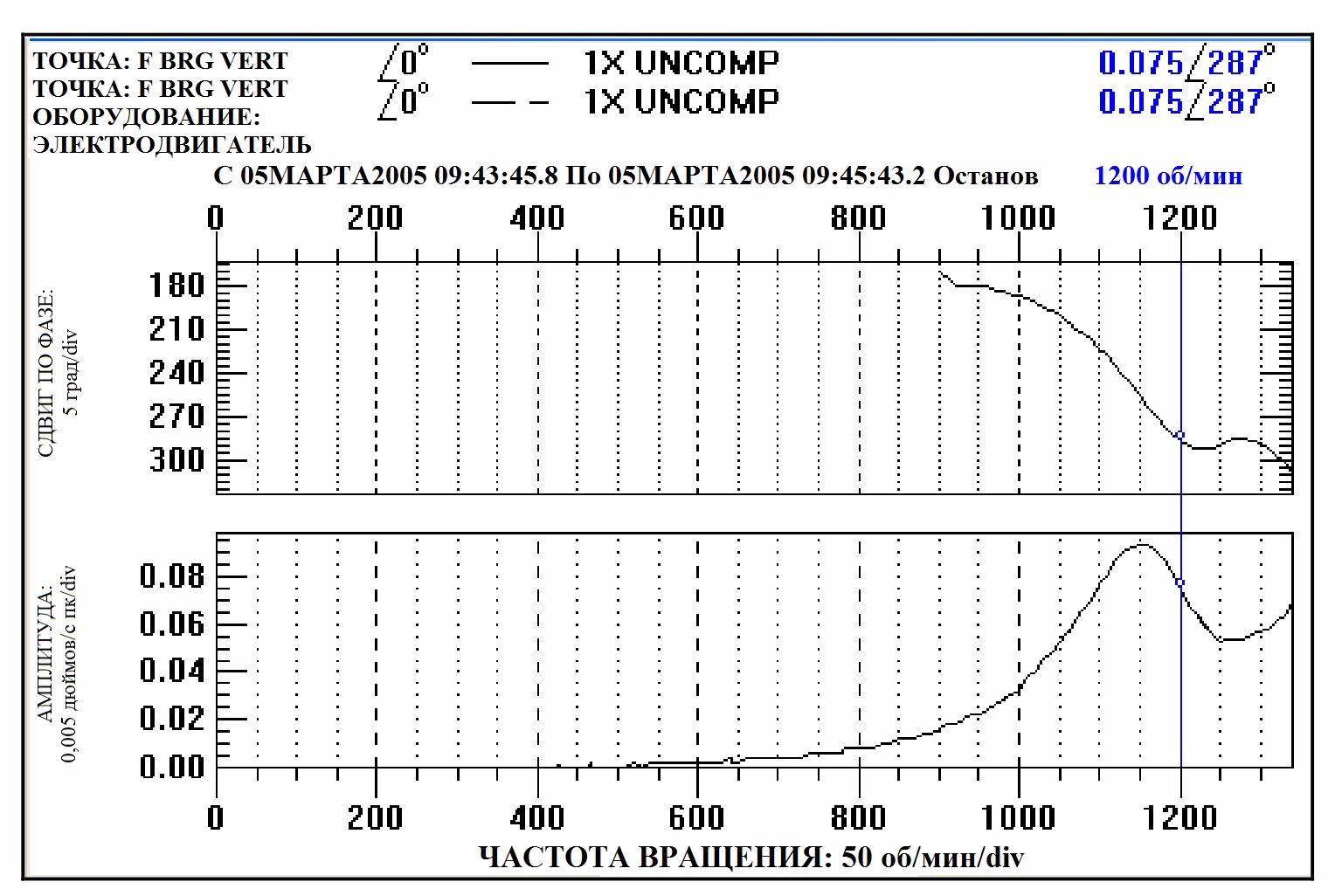
Ответ – уверенное «Нет». Об этом в данном случае заявили заказчику авторы. «Не о чем беспокоиться, как только электродвигатель будет установлен на вашей рабочей опоре, он сместит собственную частоту намного ниже, и вы будете работать над ней». Заказчик не был полностью согласен с этой идеей, но на предприятии был простой и требовалась срочная установка двигателя. Заказчик принял электродвигатель при условии, что собственная частота будет проверена по месту эксплуатации и будет приемлемой наряду с рабочими уровнями вибрации. Авторы проверили собственную частоту в полевых условиях, которая составила прекрасные 12 Гц. Таким образом, она уменьшилась с 19,2 Гц до 12 Гц. В конечном итоге вы можете видеть сдвиг собственной частоты на 50-60% от жесткого заводского крепления до реально существующего условия. Позже заказчик сообщил нам, что установка этого электродвигателя была единственным важным моментом во время простоя. Подумать только, все прошло гладко.
Выводы
Важно точно смоделировать вес и положение ротора, чтобы конечно элементная модель могла рассчитать собственную частоту моды первого порядка. В этом случае ротор представляет собой подвешенную массу без какого-либо воздействия на жесткость всей конструкции. Он просто участвует.
Анализ собственной частоты играет важную роль в успешном применении вертикальных электродвигателей. Собственную частоту электродвигателя, вес и центр тяжести можно получить у производителя электродвигателя. Эта информация может использоваться разработчиком в качестве входных данных для создания модели, чтобы правильно спроектировать систему и избежать дорогостоящих проблем резонанса.
Авторы:
Билл Бранка, P.E.
Infigen Energy,
2802 Flintrock Trace Остин, Техас 78738
Bill.Branca@infigen-us.com
Брайан Эванс
TECO-Westinghouse Motor Company
5100 N IH 35 Раунд-Рок, Техас 78681
Evansbry@tecowestinghouse.com